
Задача повышения давления в насоных установках для повышения давления решается использованием двух основных координат управления: каскадного пуска и останова дополнительных насосов, а также частотного регулирования одним или несколькими насосами. Пуск и останов дополнительных насосов обеспечивает поддержание давления напорной магистрали в заданных пределах, частотное регулирование обеспечивает поддержание давления на заданном уровне.
Следует отметить, что останов каждого насоса, не управляемого преобразователем частоты или устройством плавного пуска, производится прямым отключением его от сети питающего напряжения или в режиме «самовыбега». Такое отключение, как правило, не приводит к броскам тока в сетях питающих напряжений и заметным гидроударам. Однако с увеличением статического напора прямые отключения насосов могут вызвать гидроудары, определяемые соотношением Нст/Нф соответственно статического и фиктивного напора установки.
Пуск дополнительных насосов в таком оборудованиии определяет переходные процессы в электрических сетях питающего напряжения, а также в напорных гидравлических магистралях.
Пуск каждого дополнительного насоса может быть произведен следующими способами:
- Прямой пуск;
- Пуск по схеме «звезда - треугольник»;
- Пуск от устройства плавного пуска (УПП);
- Пуск от преобразователя частоты (ПЧ).
Рассмотрим каждый из этих способов пуска.
Производится непосредственным включением электродвигателя насоса в сеть питающего напряжения. Преимущества данного способа пуска: низкие аппаратные затраты, высокая надежность. Основные недостатки:
- в момент подключения двигателя к сети при нулевой скорости вращении и, соответственно, скольжении S=1 в обмотке статора возникает ток короткого замыкания I1кз, в 5…7 раз превышающий номинальный ток двигателя (рис.4) [2];
- наличие гидроударов в напорной магистрали.
Снижение гидроударов в напорной магистрали может быть реализовано пуском насоса на закрытую задвижку с последующим постепенным ее открытием, однако в этом случае возрастают аппаратные затраты на задвижку, редуктор которой должен иметь сервис – фактор не менее 1,8 [4], что приводит к удорожанию системы управления насосной станцией.
Осциллограмма значения активного тока Iа при прямом пуске насоса мощностью 11 кВт на закрытую задвижку приведена на рис.1
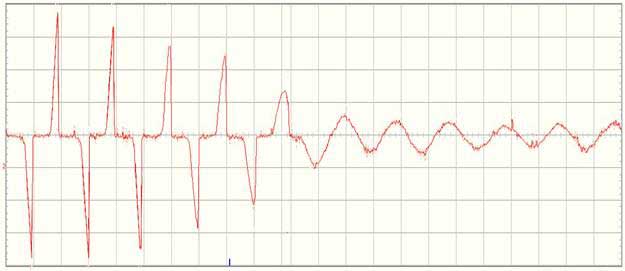
Рис.1. Осциллограмма тока при прямом пуске насоса
Осциллограмма (рис. 1) показывает, что импульсы тока в сети питающего напряжения электродвигателя насоса при его прямом пуске даже на закрытую задвижку достигают примерно значения 6,7 номинального тока электродвигателя Iном и составляют не менее 147 А для насоса мощностью Р=11 кВт. При этом длительность импульсов составляет 0,004 секунды.
Осциллограмма изменения давления за насосом при его пуске на закрытую задвижку приведена на рис. 2. Изменение напора в течение короткого промежутка времени - гидроудар при пуске насоса определяется следующими параметрами: повышение напора на 20 метров в течение 0,06 секунды.
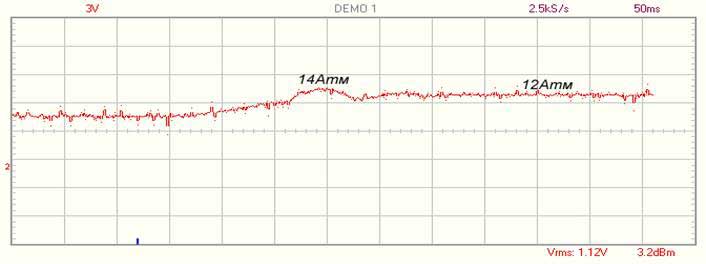
Рис.2 Изменение напора за насосом Р=11 кВт при пуске на закрытую задвижку
Прямой пуск дополнительного насоса в ряде случаев производится при наличии параллельно работающего насоса с частотным регулированием. Основными показателями динамики частотного регулирования насоса являются время рампового пуска, в течение которого производится плавный разгон насоса от нулевой до максимальной скорости вращения, а также время рампового останова, в течение которого производится плавный останов насоса от максимальной скорости вращения. Как показывает опыт эксплуатации насосных установок, самая «короткая» рампа, характеризуемая наиболее крутой характеристикой изменения частоты питающего напряжения насоса при его пуске и останове, может быть определена значением не более 10 Гц/с.
В течение времени гидроудара Δt ≤0,06 c преобразователь частоты сможет снизить частоту питающего напряжения на величину не более 0,6 Гц. С учетом наличия схемы фильтрации сигналов датчиков, а также времени реакции схемы ПИД - регулирования, обеспечивающих устойчивость переходных процессов, изменение частоты вращения регулируемого насоса в сторону его уменьшения может быть реализовано только через 0,8…1,2 секунды после возникновения гидроудара.
Таким образом, наличие регулируемого преобразователем частоты насоса не позволяет демпфировать гидроудары, возникающие при прямом пуске дополнительного насоса.
Преимуществом данного способа является возможность безударного пуска насоса из-за снижения пускового момента [2] при понижении питающего напряжения обмоток статора двигателя.
Очевидным недостатком данного способа является увеличения количества коммутационной аппаратуры (рис 3). Пуск с переключением обмоток двигателя может быть реализован только для насосов с фазной обмоткой, рассчитанной на 0,4 кВ.
Рис.3. Пуск насоса по схеме «звезда-треугольник»
Зависимости изменения вращающего момента на валу электродвигателя насоса М и потребляемого активного тока статора I1 от величины скольжения электродвигателя S представлены на рис 4.
При пуске электродвигателя насоса его обмотки подключаются по схеме «звезда» (рис. 3). При этом фазное напряжение на статоре понижается в ![]() раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя (рис. 4).
раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя (рис. 4).
Следует учитывать, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети: ![]() [2]. Таким образом, снижение питающего напряжения, подаваемого на рабочую обмотку, в
[2]. Таким образом, снижение питающего напряжения, подаваемого на рабочую обмотку, в ![]() раза с 380 до 220 В вызовет снижение вращающего момента в 3 раза (М0Δ = 3М0 звезда, рис.4), что, в свою очередь, приводит к увеличению скольжения. Поскольку работа электродвигателя при включении обмоток по схеме «звезда» происходит на неустойчивом участке механической характеристики М=М(S), определяемом значением скольжения Sкр<Sзвезда<1, дальнейшее увеличение скольжения из-за увеличения момента сопротивления при разгоне насоса приводит к уменьшению вращающего момента [2,3]. При этом необходимо учитывать, что момент сопротивления насоса складывается из суммы статической составляющей, определяемой противодавлением и трением в опорах и уплотнениях, а также динамической составляющей, пропорциональной квадрату частоты вращения насоса [1].
раза с 380 до 220 В вызовет снижение вращающего момента в 3 раза (М0Δ = 3М0 звезда, рис.4), что, в свою очередь, приводит к увеличению скольжения. Поскольку работа электродвигателя при включении обмоток по схеме «звезда» происходит на неустойчивом участке механической характеристики М=М(S), определяемом значением скольжения Sкр<Sзвезда<1, дальнейшее увеличение скольжения из-за увеличения момента сопротивления при разгоне насоса приводит к уменьшению вращающего момента [2,3]. При этом необходимо учитывать, что момент сопротивления насоса складывается из суммы статической составляющей, определяемой противодавлением и трением в опорах и уплотнениях, а также динамической составляющей, пропорциональной квадрату частоты вращения насоса [1].
В соответствие этому, частота вращения насоса при понижении питающего напряжения статорных обмоток ограничена условием выполнения равенства М сопротивления = М вращения.
Вращение электродвигателя насоса в течение времени Тзвезда = t1 при включении по схеме «звезда» (4…6 секунд) с повышенным скольжением вызывает повышение тока статора (рис.4). Отсутствие схемы ограничения потребляемого тока может вызвать перегрев обмоток электродвигателя, а в ряде случаев - срабатывание электромагнитной или тепловой защиты при повышении момента сопротивления со стороны насоса [2]
Рис. 4. Графики зависимостей момента электропривода насоса и тока обмотки статора от величины скольжения при прямом пуске и пуске по схеме «звезда-треугольник»
Ммакс – максимальное значение момента вращения, соответствующее скольжению Sкр > 0; Мном – номинальное значение момента вращения, соответствующее номинальному скольжению Sном; М0звезда, М0Δ – пусковой момент при включении обмоток электродвигателя насоса соответственно по схеме «звезда» и «треугольник»; I1звезда, I1Δ(I1кз) – значения пускового тока при включении обмоток электродвигателя насоса соответственно по схеме «звезда» и «треугольник» (ток короткого замыкания); I0 - значение тока статора при коммутации обмоток из схемы «звезда» в схему «треугольник» при Тпаузы=0;I1макс – максимальное значение тока статора при S1<0; Sзвезда /Δ – скольжение электродвигателя насоса в момент отключения питающего напряжения при работе по схеме «звезда»; -S0 – минимально возможное значение скольжения электродвигателя насоса после отключения обмоток по схеме «звезда»;
0-t1 – время пуска по схеме «звезда»; t1-t2 – время полного останова насоса; t2-t3- время начала пуска насоса при включении обмоток по схеме «треугольник» после его полного останова; t3-t4 – время прямого пуска насоса по схеме «треугольник».
После разгона насоса при включении обмоток электродвигателя по схеме «звезда» через время Тзвезда автоматика управления насосной станцией отключает его от сети питающего напряжения и через время Тпаузы - подключает к сети по схеме «треугольник». Время Тпаузы обеспечивает уменьшение размагничивающего тока ротора при «самовыбеге» насоса (S<0 – рис.4) и насыщение железа статора. При сокращении Тпаузы степень насыщения железа статора и, как следствие, индуктивное сопротивление его обмотки снижается, что приводит к значительным броскам тока в сети питающего напряжения при подключении двигателя по схеме «треугольник» [3].
Состояние электродвигателя, определяемое значением скольжения S=0, является неустойчивым [3]: при отключении обмоток от сети питающего напряжения он переходит из состояния S=0 в состояние S=1, минуя промежуточные состояния (рис. 4). Поскольку время останова нагруженного насоса при включении обмоток по схеме «звезда» tост =t2-t1 весьма мало, практически невозможно обеспечить условие его «безударного» пуска при переключении обмоток в течение t2<Тпаузы< t1 без разумных аппаратных затрат.
В соответствие с этим, переключение обмоток при Sкр<Sзт<1 приводит к останову нагруженного электродвигателя в течение времени t2≤Тпаузы≤t3,при этом Sстремится к1, а его скольжение в течение времени Тпуска = t4-t3≤0,06 секунд изменяется от значения S=1 до S=Sном. Момент вращения при этом изменяется от М0 Δ до Мном через значение Ммакс(рис.4), тем самым при Тпуска→0 в сети возникает гидроудар.
Пуск насоса с переключением обмоток эффективен лишь в том случае, когда его удается разогнать при включении обмоток по схеме «звезда» до значения Sзвезда≈Sном, и вывести на устойчивый участок механической характеристики с тем, чтобы пуск двигателя после переключения обмоток в схему «треугольник» происходил от значения SΔ<Sкр для исключения гидроудара. Вполне очевидно, что это условие выполнимо только при ненагруженном электродвигателе (М сопротивления << М вращения), что противоречит условию равенства моментов нагруженного двигателя.
Таким образом, пуск насоса с переключением обмоток электродвигателя из схемы «звезда» в схему «треугольник» является неэффективным средством снижения бросков тока в сети питающего напряжения и гидроударов в напорной магистрали.
Производится также с понижением питающего напряжения с последующим его увеличением до номинального значения, однако, в отличие от пуска по схеме «звезда-треугольник», ток статора электродвигателя ограничивается при этом значением (2..3) Iном.
На рис. 5а приведена структура насосной станции с одним ПЧ и УПП для каждого насоса, на рис. 5б – с одним ПЧ и одним УПП для группы насосов. Преимуществом данного способа является обеспечение плавного пуска каждого насоса, что позволяет избежать гидроударов, а также бросков тока в сети питающего напряжения.
Рис.5. Структурная схема пуска дополнительных насосов с использованием ПЧ и софтстартера
Основные недостатки схемы рис. 5а:
- аппаратная избыточность, повышающая стоимость насосной станции;
- потеря функции частотного регулирования автоматики управления насосом при его отказе, работающего от ПЧ;
- снижение показателей надежности за счет увеличения количества УПП;
- невозможность резервирования отказа УПП;
- невозможность реализации схемы автоматического чередования всех насосов для обеспечения равномерности выработки их ресурса.
Cхемы рис. 5б:
- увеличение элементов коммутации насосов, снижающее надежность системы управления;
- отсутствие защиты ПЧ от замыкания его выходных ключей на сеть питающего напряжения, являющегося критичным условием отказа преобразователя.
Общие недостатки схем 5а, 5б:
- перегрев обмоток электродвигателей при пуске с повышенным скольжением из-за снижения момента вращения, а также из-за несинусоидальности питающего напряжения [3];
- ограничение количества пусков дополнительных насосов. Так, например, устройства плавного пуска мощностью более 4 кВт обеспечивают не более 20 пусков дополнительных насосов в час длительностью пуска 6…8 секунд из-за перегрева тиристорных ключей. Таким образом, схема 4а позволяет реализовать не более 30 пусков, схема 5б – не более 15 пусков дополнительных насосов в течение часа. При времени пуска первого дополнительного насоса 16…18 секунд, останова первого насоса 12…16 секунд количество пусков и остановов каждого дополнительного насоса может превышать 120 циклов в час при работе системы повышения давления в неустойчивых зонах характеристик [1].
Плавный останов каждого насос от УПП еще более сократит количество циклов пуска каждого насоса в течение часа.
Таким образом, применение УПП в схеме управления приводит к ухудшению точности поддержания давления в напорной магистрали, что, с одной стороны, приводит к потерям передавливания из-за повышения напора [1], с другой стороны - к нежелательному снижению напора в диктующих точках.
Преимуществом данного способа является возможность плавного пуска каждого насоса, обеспечивающего отсутствие бросков тока в сетях питающего напряжения и гидроударов в напорных магистралях.
При реализации данного способа пуска удается минимизировать аппаратные затраты в насосных станциях, обеспечить равномерную выработку ресурса всех насосов, а также функциональное резервирование преобразователя частоты при его отказе прямым пуском и остановом насосов по уровню давления в напорной магистрали.
Структура системы коммутации насосов для схемы управления с одним ПЧ представлена на рис.6.
Рис. 6. Структура системы коммутации насосов с одним ПЧ в схеме управления
Сложность реализации данного способа состоит в том, что пуск каждого дополнительного насоса от преобразователя частоты (ПЧ) для схем управления с количеством ПЧ меньше количества насосов возможен только после переключения регулируемого преобразователем насоса к сети питающего напряжения.
Таким образом, для реализации данного способа пуска насосов необходимо решить две задачи:
а) переключение насоса, управляемого преобразователем частоты, к сети питающего напряжения;
б) пуск следующего по приоритету насоса от преобразователя частоты.
Механическая М=М(S) и электромеханическая I1=I1(S) характеристики электродвигателя насоса при переключении от ПЧ к сети питающего напряжения представлены на рис. 7.
Вращение насоса преобразователем частоты перед подключением к сети производится с номинальными значениями частоты вращения nном, момента Мном при номинальном значении скольжения Sном. При отключении обмоток электродвигателя от преобразователя частоты в момент времени коммутации tк двигатель переходит в генераторный режим, его скольжение изменяет знак и принимает значение -1 < -Sк < -Sкр.
Величина скольжения Sк<0 в генераторном режиме при отключении питающего напряжения ПЧ зависит от инерционности электродвигателя и насоса, определяемой массой и диаметром ротора электродвигателя и рабочего колеса насоса [3]. Очевидно, чем мощнее и, соответственно, инерционнее электродвигатель и насос, тем ближе точка –Sк приближается к значению -1, и тем больше интервал времени полного останова насоса tа, tб (рис.7).
Ток ротора оказывает размагничивающее влияние на обмотку статора [2], поэтому при подключении электродвигателя насоса к сети питающего напряжения без выдержки времени после отключения от ПЧ в генераторном режиме при S<0 возможен бросок тока до значения I1макс > I1кз(рис.7).
Для снижения бросков тока подключение электродвигателя насоса к сети питающего напряжения после его отключения от ПЧ целесообразно производить в интервале времени tа≤t≤tб при скольжении -Sа≤-Sк≤-Sб, при этом ток статора приобретает значения I1a≤I1≤I1б. Момент на валу электродвигателя насоса при его подключении с сети питающего напряжения из состояния вращения меняет знак с «-» на «+», при этом его значение не выходит за пределы максимального момента сопротивления в генераторном режиме -Ммакс г и максимального момента вращения в двигательном режиме Ммакс дв в течение интервала времени ta≤t≤tб, что обеспечивает минимальные изменения напора и, соответственно, снижение гидроударов в напорной магистрали при коммутации насосов.
Рис. 7. Механическая М=М(S) и электромеханическая I1=I1(S) характеристики электропривода насоса
Ммакс дв – максимальное значение момента вращения в двигательном режиме, соответствующее значению скольжения Sкр > 0; Мном – номинальное значение момента вращения, соответствующее номинальному скольжению Sном; М0 – пусковой момент при S=1; -Ммакс г – максимальное значение момента сопротивления в генераторном режиме, соответствующее значению скольжения -Sкр<0; I1кз – значение тока короткого замыкания при S=1; I1макс – максимальное значение тока статора при S<0 в генераторном режиме; -Sк – скольжение в момент времени tк отключения питающего напряжения ПЧ; -Sа,-Sб – скольжение в моменты времени tа и tб подключения насоса к сети питающего напряжения.
При увеличении интервала времени подключения насоса к сети питающего напряжения из состояния его вращения за значение tб возможен полный останов насоса. При этом скольжение принимает значение S=1. Подключение насоса к сети питающего напряжения из состояния S=1 приводит к изменению момента вращения на валу насоса от пускового значения М0 до номинального значения Мном в течение времени прямого пуска (tпуска ≤0,06 секунд) через значение Ммакс дв (рис.7), что приводит к гидроудару в напорной магистрали.
Для рассматриваемого способа пуска интервал времени tб-tа >> t2-t1 интервала времени способа пуска «звезда – треугольник», поэтому его реализация не требует дополнительных аппаратных затрат.
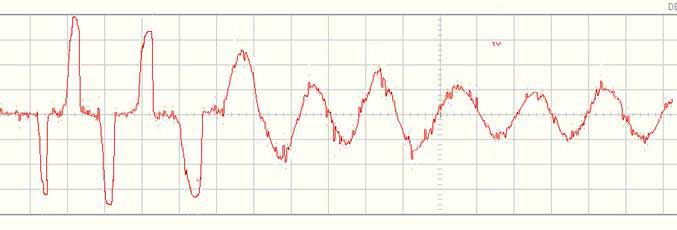
На рис. 8 представлена осциллограмма фазного напряжения обмотки статора насоса мощностью 11 кВт при его отключении от ПЧ и последующем подключении к сети питающего напряжения. При отключении двигателя от ПЧ он переходит в генераторный режим за счет остаточного намагничивания обмоток статора и инерционного вращения ротора. При этом электромагнитное поле обмоток затухает по мере останова ротора электродвигателя насоса на «самовыбеге».
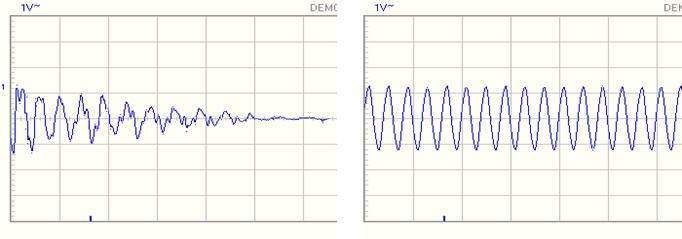
Рис. 8. Осциллограмма напряжения обмоток электродвигателя насоса Р=11 кВт при отключении питающего напряжения
Осциллограммы активного тока насоса мощностью 11 кВт при его переключении от ПЧ к сети питающего напряжения для разных значений времени переключения представлена на рис. 9.
а) t переключения = 0,20 секунд
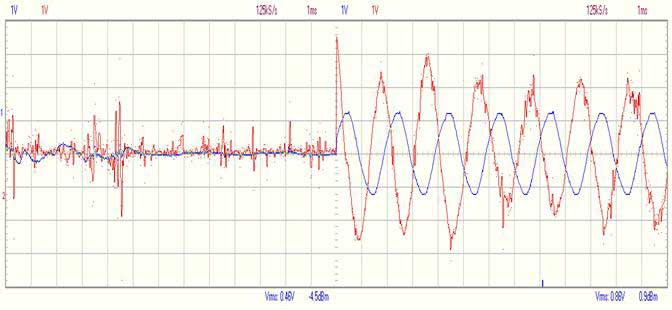
б) t переключения = 0,34 секунды
Рис. 9. Переключение от ПЧ к сети питающего напряжения
Анализ осциллограмм показывает, что бросок активного значения тока статорных обмоток насоса при его подключении к сети питающего напряжения после работы от ПЧ уменьшается от значения 3*Iном до значения 1,5Iном при уменьшении времени переключения от 0,2 до 0,34 секунды. На диаграмме рис.7 это соответствует значениям тока статора соответственно I1а и I1б при увеличении времени коммутации от значения tа до значения tб.
После переключения регулируемого ПЧ насоса к сети питающего напряжения пуск следующего по приоритету дополнительного насоса производится от ПЧ по заданной рампе до частоты вращения, определяемой процессом регулирования.
Таким образом, наиболее рациональным способом пуска дополнительных насосов в насосных станциях повышения давления с одним ПЧ в схеме управления является пуск каждого дополнительного насоса от ПЧ после переключения регулируемого насоса из состояния его вращения к сети питающего напряжения.
При этом необходимо выдерживать временные интервалы между отключением насоса от ПЧ и его последующем подключении к сети питающего напряжения. Уменьшение интервала времени коммутации насоса вызовет значительные броски тока в сети питающего напряжения, что приведет к срабатыванию защиты насоса. Увеличение времени коммутации приведет к полному останову насоса и возникновению гидроудара в напорной магистрали при его подключении к сети питающего напряжения. Интервалы времени коммутации определяются мощностью электродвигателя насоса и должны настраиваться при индивидуальной наладке установки повышения давления.
Плавный пуск дополнительных насосов при условии «безударного» включения регулируемого насоса к сети питающего напряжения с использованием кинетической энергии его вращения позволяет уменьшить гидроудары, а также броски тока в электрических сетях, обеспечивая тем самым отсутствие порывов в напорных магистралях, а также надежную работу электротехнического оборудования. Повышение качества переходных процессов в электрических сетях и напорных магистралях для данного способа пуска дополнительных насосов достигается при сокращении аппаратных затрат в насосных станциях повышения давления.